How to store multiple poses? - General Application Help: How do I? - Universal Robots Forum
$ 15.50 · 4.8 (150) · In stock

Hi, I need to store multiple positions/poses of the robot to access them later in the program. The number of positions depends on the user input - the query works perfectly. I thought I could just make a loop and fill each pose into an array but it does not work. I know how to store a pose in a single variable but in my application the user decides how many poses he needs to store. Can anyone shed some light here? Thanks and best regards Stephan PS: oh and where can I change my username to

Position variable has two different positions - Technical Questions - Universal Robots Forum
An Agenda for Action: Alternative Processes for Negotiating a Killer Robots Treaty

Some AI research areas and their relevance to existential safety — AI Alignment Forum
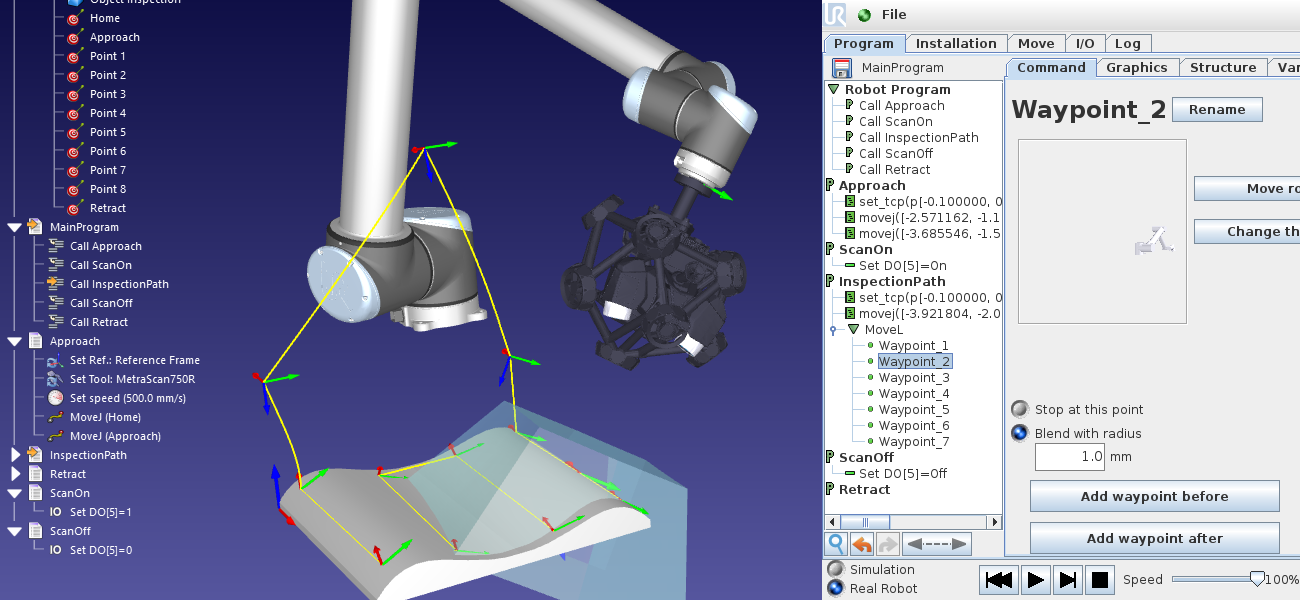
How to Modify RoboDK's Robot Programs with a UR Teach Pendant - RoboDK blog
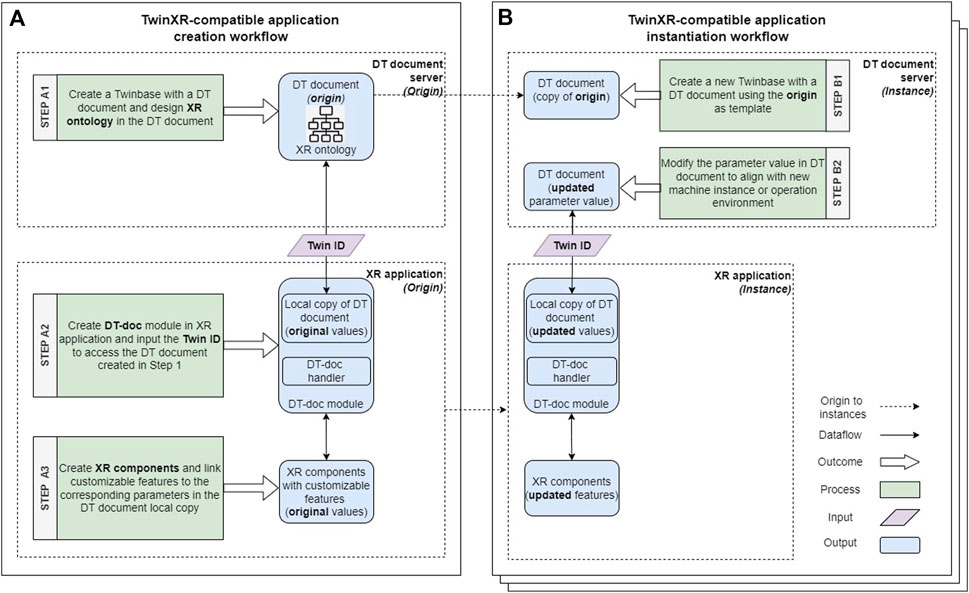
Frontiers TwinXR: Method for using digital twin descriptions in industrial eXtended reality applications

6 advances in robot grippers for robotics developers to watch

Industrial Robots, Fundamentals of Industrial Robots
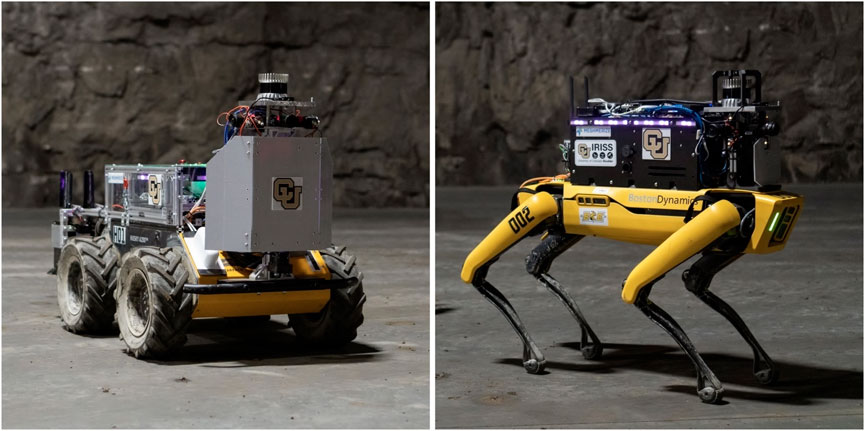
Frontiers Terrain-aware semantic mapping for cooperative subterranean exploration
New Report: Risky Analysis: Assessing and Improving AI Governance Tools
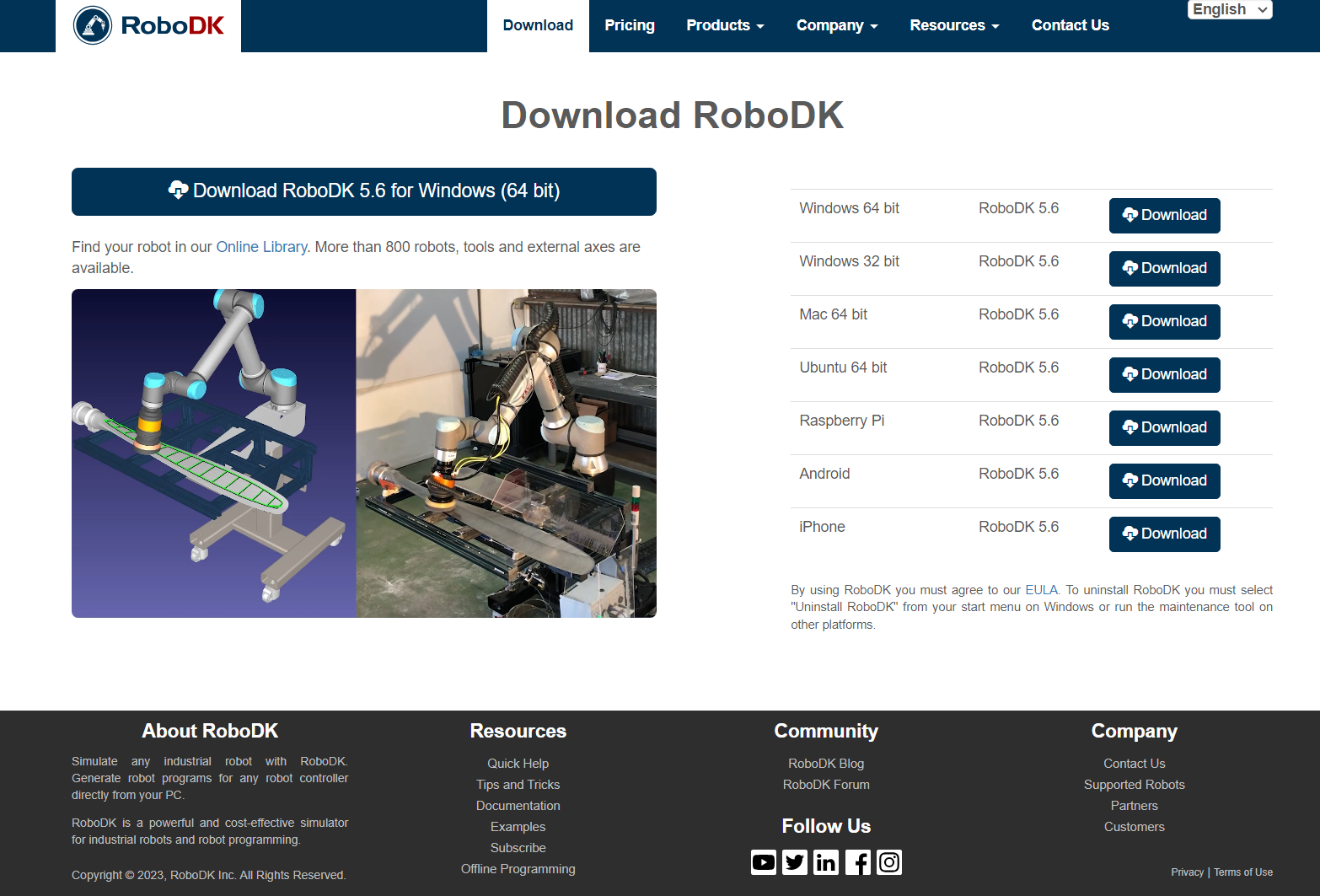
Basic Guide - RoboDK Documentation
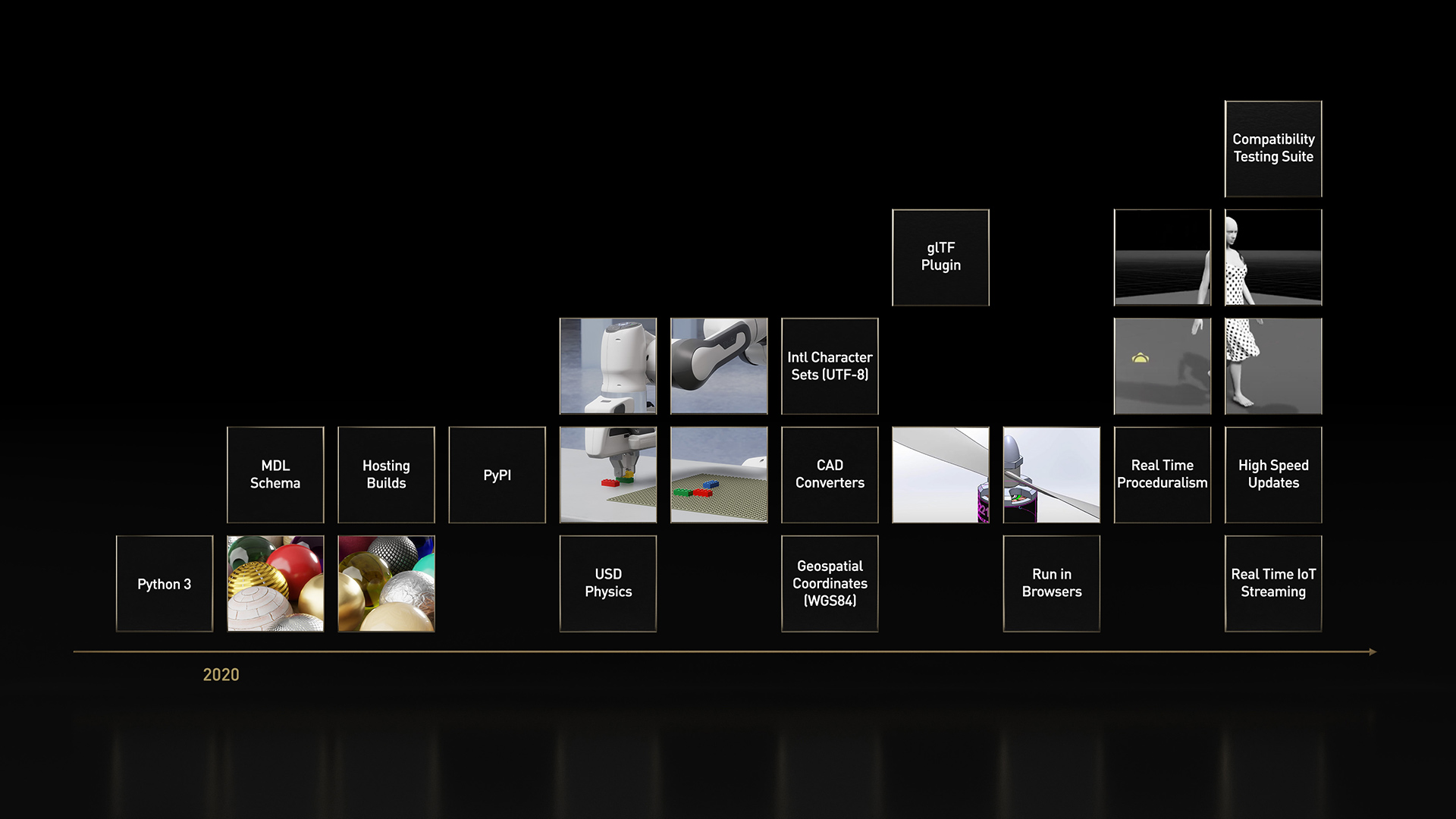
Universal Scene Description as the Language of the Metaverse

Campus Resources Office of International Students & Scholars

Direction until distance - Technical Questions - Universal Robots Forum

How to make a robot - FutureLearn