Energies, Free Full-Text
$ 29.99 · 4.7 (319) · In stock
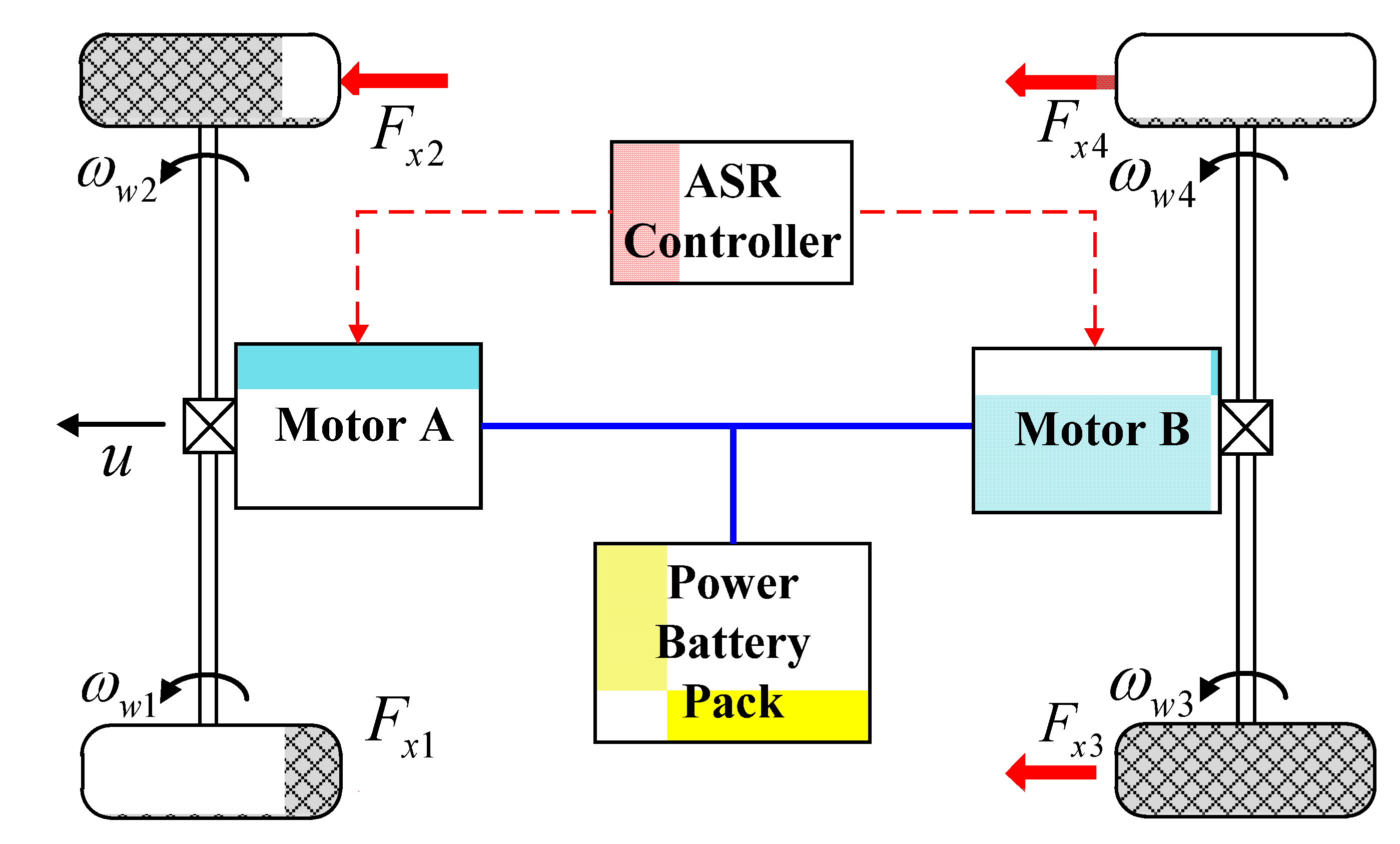
This paper presents an acceleration slip regulation (ASR) system for four-wheel drive (4WD) electric vehicles, which are driven by the front and rear axles simultaneously. The ASR control strategy includes three control modes: average distribution of inter-axle torque, optimal distribution of inter-axle torque and independent control of optimal slip rate, respectively, which are designed based on the torque adaptive principle of inter-axle differential and sliding mode control theory. Furthermore, in order to accurately describe the longitudinal tyre force characteristic, a slip rate calculation formula in the form of a state equation was used for solving the numerical problem posed by the traditional way. A simulation was carried out with the MATLAB/Simulink software. The simulation results show that the proposed ASR system can fully use the road friction condition, inhibit the drive-wheels from slipping, and improve the vehicle longitudinal driving stability.

Energies An Open Access Journal from MDPI

Lole Power System Reliability
Energies, Free Full-Text, ghg emissions
Energies Free Full-Text Nonylphenol Ethoxylate Surfactants, 49% OFF

Energies, Free Full-Text, ghg emissions

Energies Free Full Text A New Approach To Include Complex
Lole Power System Reliability

Energies, Free Full-Text, pengguna kilo kilo no mi

Energies, Free Full-Text, alpha zero campinas

Aspen Plus diagram of the biodiesel production process at
Energies, Free Full-Text, ghg emissions

Energies, Free Full-Text, Wind Turbine Blade Design